
























作品詳情
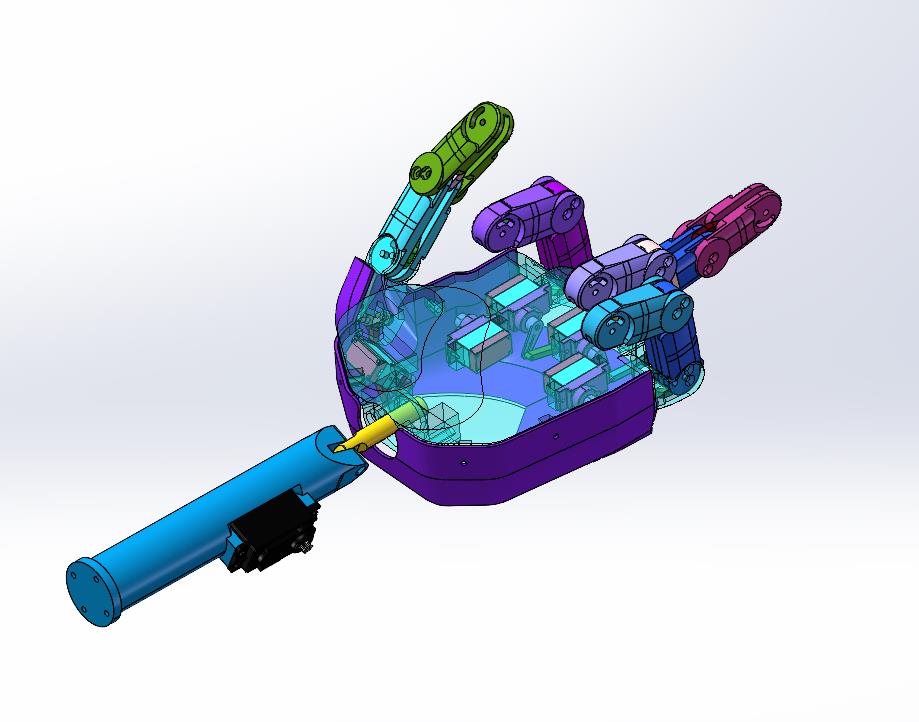
仿生機械五自由度五指手爪是一種模擬生物手部功能的機械裝置,具備五個獨立關(guān)節(jié)和五個指頭,可實現(xiàn)復(fù)雜操作。其設(shè)計靈感來源于自然界生物手部結(jié)構(gòu),具有較高的靈活性和抓取能力。通過精確控制每個關(guān)節(jié)和指頭的運動,該手爪能夠執(zhí)行多種任務(wù),如抓取、操作、夾持等。其廣泛應(yīng)用于工業(yè)機器人、醫(yī)療康復(fù)、航空航天等領(lǐng)域,為現(xiàn)代機械制造業(yè)帶來革命性變革。



平diy桌面級快速成型3D打印機")






動臺袋子印畫設(shè)備")








